
Existen dos versiones del Motor Shield para Wemos:
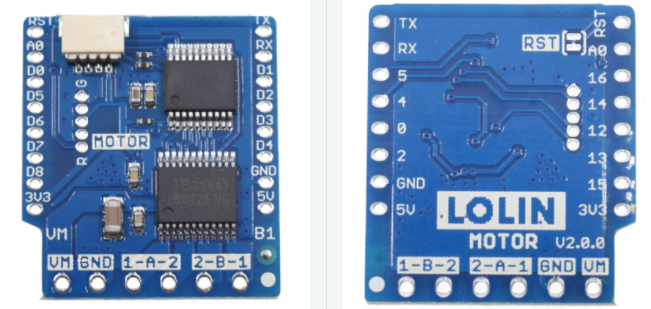
Wemos Motor Shield V1.0.0
Wemos Motor Shield V2.0.0
Caracteristicas
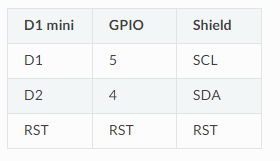
- I2C interface
- Power supply voltage: VM=15V max
- Output current: Iout=1.2A(average) / 3.2A (peak)
- Standby control to save power
- CW/CCW/short brake/stop motor control modes
Similitudes y diferencias entre Motor Shield V1.0.0 y V2.0.0
Principalmente han cambiado algunas características del hardware, La V1.0.0 disponía de más pines y posibles configuraciones del hardware, mientras la 2 ha quedado simplificada. por ello tenemos una parte del hardware idéntica entre V1 y V2 y una parte adicional de conectores y pines que solo están disponibles en la V1:
Pines Comunes
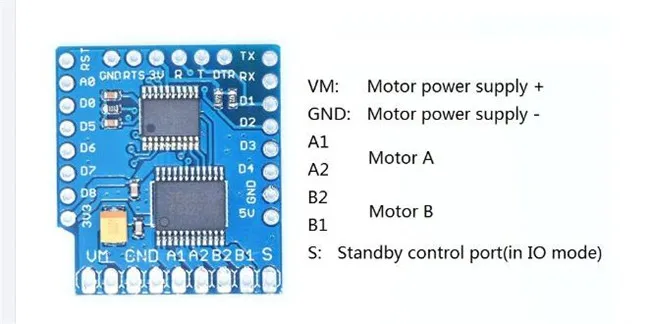
- VM: Motor power supply + (Max 15Vdc)
- GND: Motor power supply –
- 1-A-2: Motor A
- 2-B-1: Motor B
Pines exclusivos de Motor Shield V1.0.0
- S: Standby control port (in IO mode)
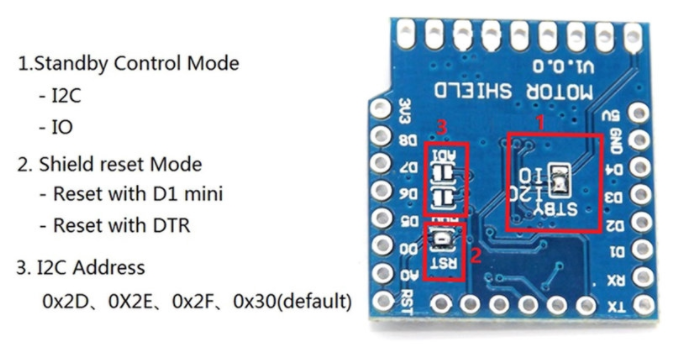
- Stanby control mode
- I2C mode: Control TB6612’s STBY with I2C protocol
- IO mode: Control TB6612’s STBY with “S” pin
- Shield reset mode
- short: reset with d1 mini (reset at power on or press d1 mini’s reset button)
- open: reset by “DTR” pin.
Además en Motor Shield V1.0.0 se puede escoger la dirección del I2C con una soldadura en la parte trasera de la placa, quedando con la siguiente configuración entendiendo los “-” como soldado y las “x” como desoldado
| AD1 | AD0 | Address |
|---|---|---|
| – | – | 0x2D |
| – | x | 0x2E |
| x | – | 0X2F |
| x | x | 0x30(default) |
Documentación oficial:
- Esquematico V1.0.0: https://wiki.wemos.cc/_media/products:d1_mini_shields:mini_motor.pdf
- Esquematico V2.0.0: http://docs.wemos.cc/en/latest/_static/files/sch_motor_v2.0.0.pdf
- Liberia para Arduino: https://github.com/wemos/LOLIN_I2C_MOTOR_Library/tree/master/examples
- Ejemplos para Arduino: https://github.com/wemos/LOLIN_I2C_MOTOR_Library/tree/master/examples
Problemas comunes con D1 Mini motor Shield V1.0.0
En la versión V1.0.0 como hemos visto existe la posibilidad de que se tengan que realizar unas soldaduras en la parte trasera para configurar la placa. Dependiendo del ensamblador de la placa, estas soldaduras te pueden venir por defecto de fabrica o no.
Si la placa te ha venido sin soldaduras en la parte trasera es probable que parezco que no te funciona el Motor Shield V1.0.0 de Wemos.
Para que funcione, debemos soldar dos puentes de soldadura en los pads traseros:
- Unir los dos PADs del RST
- Unir el PAD central de STBY con el de I2C (sin que el IO quede afectado).
De no hacer las soldaduras mencionadas, el Motor Shield no funcionará y no llegará ninguna señal hacia el motor que se desee utilizar.
